
Lab 6 - Rotational Equilibrium
Introduction
Have you ever tried to pull a stubborn nail out of a board or develop your forearm muscles by lifting weights? Both these activities involve using a "lever-type" action to produce a turning effect or torque through the application of a force. The same torque can be produced by applying a small force at a larger distance (with more leverage) or by applying a larger force closer to the point about which the object has to rotate. These two examples are shown in Fig. 1. In the case of the hammer pulling the nail, a small force applied at the end of the handle translates into a larger force being exerted on the nail at a smaller distance from the point where the nail is fixed to the board. In the second example the weight on the palm of the hand is at a greater distance from the elbow. This requires the muscles to apply a larger force at a smaller distance, usually less than 5 cm from the elbow. These are both examples of lever action—force applied at a distance from a fulcrum or pivot point or axis of rotation. A force applied as described in the above examples results in a torque on a body. Torque usually produces a rotation of a body.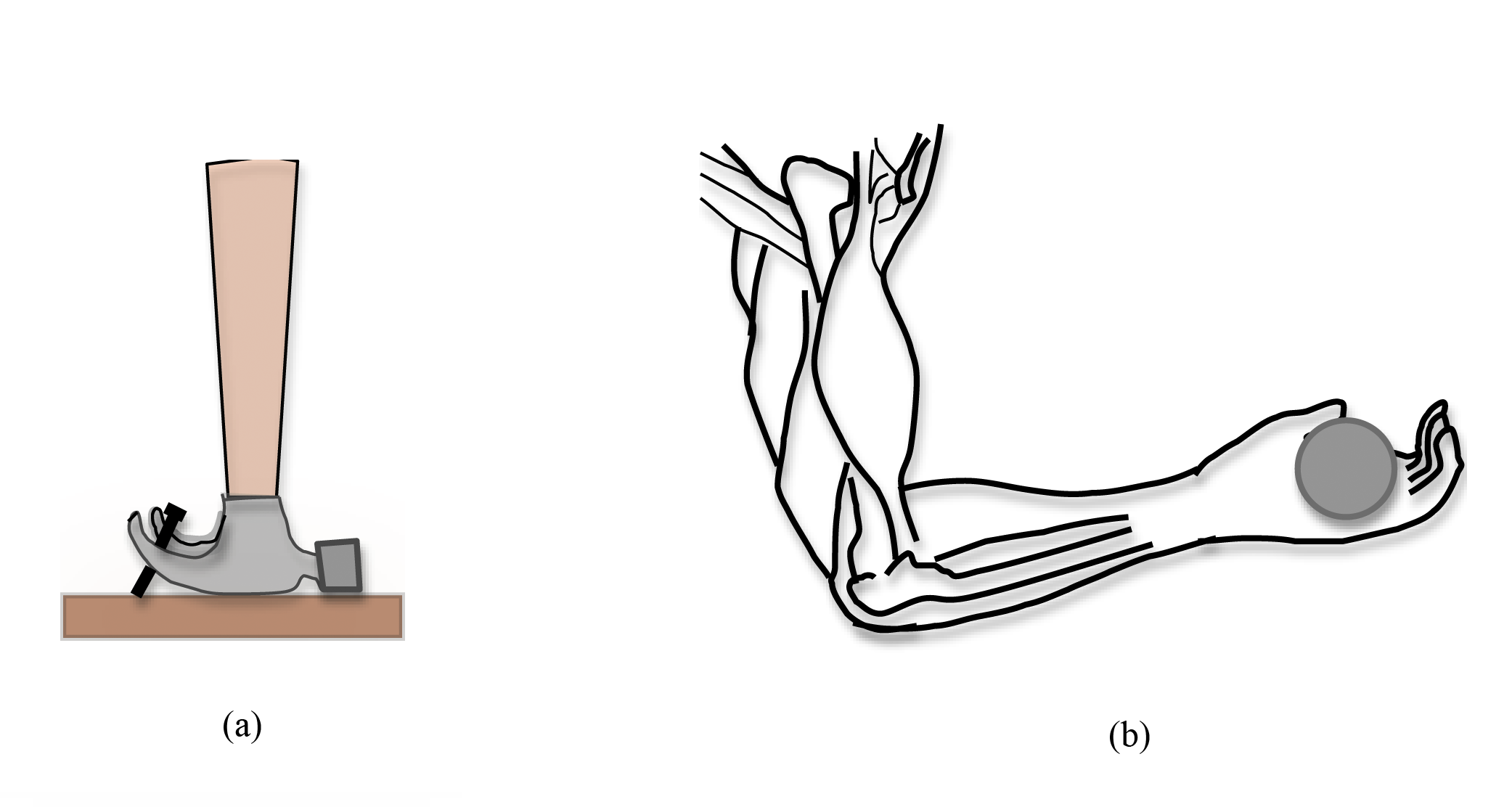
Figure 1: Two examples of torque
Discussion of Principles
Torque is a measure of the turning effect of an applied force on an object, and is the rotational analogue to force. In translational motion, a net force causes an object to accelerate, while in rotational motion, a net torque causes an object to increase or decrease its rate of rotation. Torqueτ
is the product of the applied force and the perpendicular distance from the pivot point to the line of action of the force and is measured in units of N·m.
( 1 )
τ = Fr
⊥r⊥
is sometimes called the "lever arm."
Note: Torque has the same units as work, i.e., force times distance. Torque and work, however, are entirely different physical concepts; the fact that they have the same units is a coincidence.
Calculation of torque
Consider the irregularly shaped two-dimensional object shown in Fig. 2a.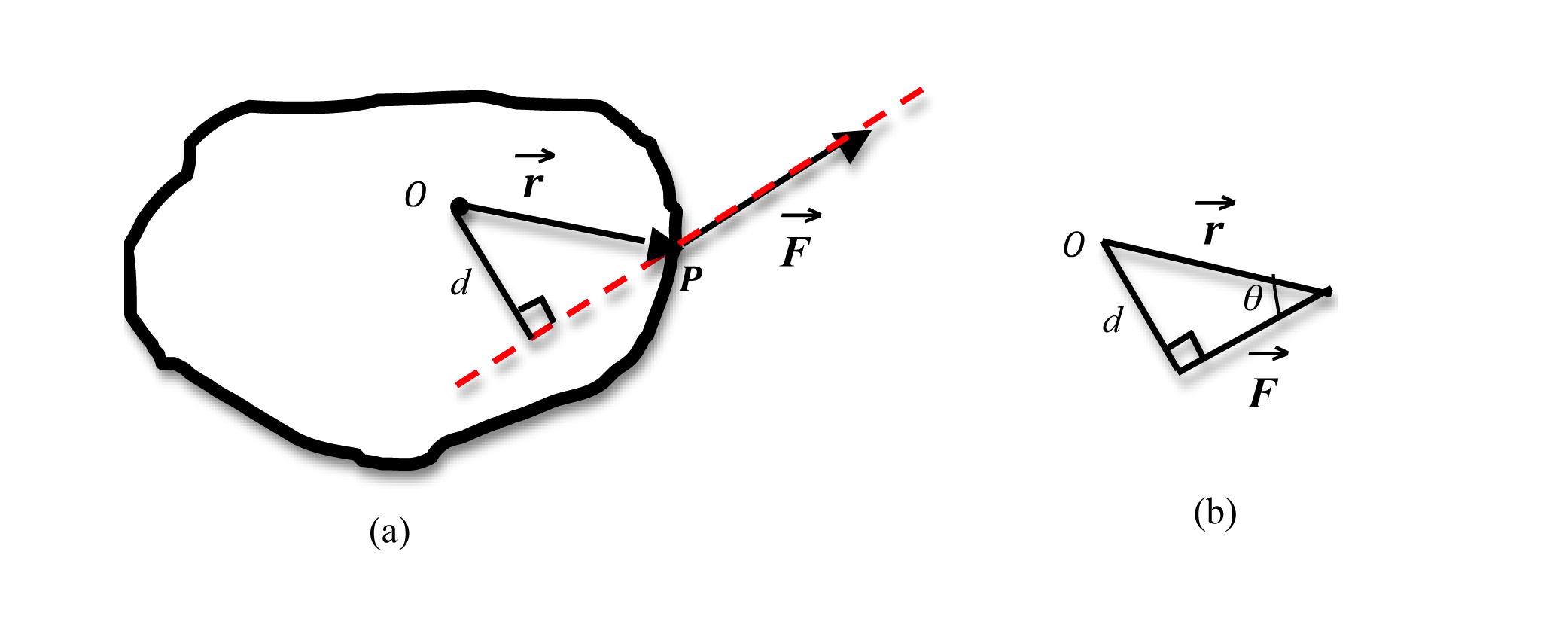
Figure 2: Illustration of lever-arm concept
1
Sketch a line through the force. This dashed line in Fig. 2a represents the line of action of the force.
2
Draw a perpendicular line from the axis of rotation O to the line of action of the force. This line, marked d in Fig. 2, represents the lever arm.
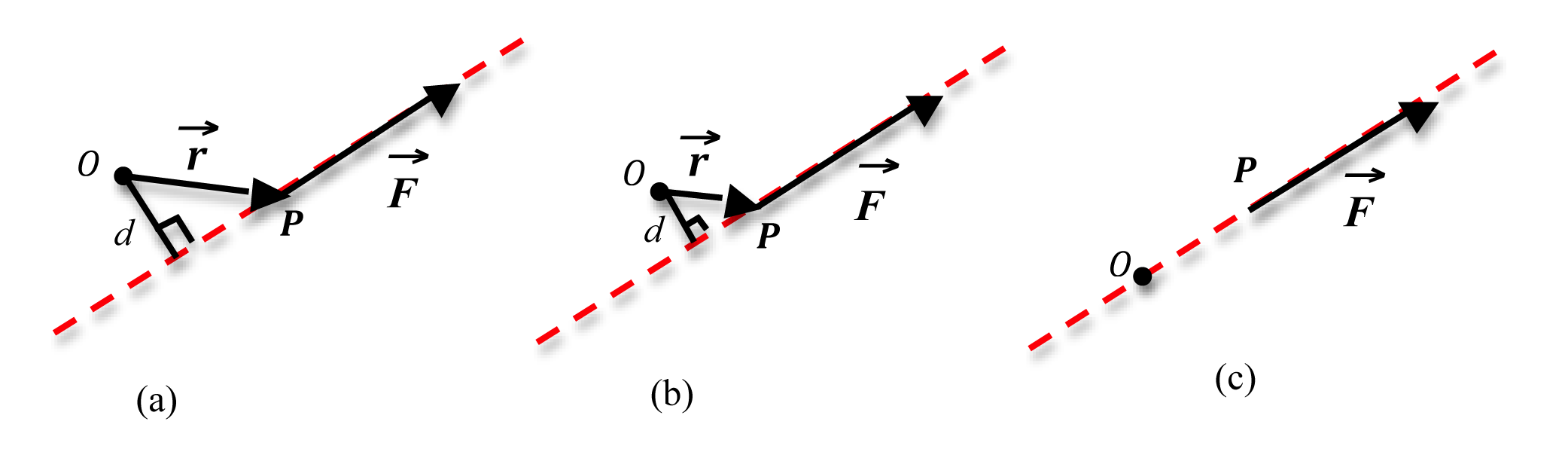
Figure 3: Dependence of lever arm on point of application of force
( 2 )
d = r sin θ
θ
is the angle between r
and F.
Equation (1) can now be written as
. ( 3 )
τ = rF sin θ.
r
and F
( 4 )
τ = r × F.
= r × F. Net torque
If two or more forces are applied to an object, each force produces a torque. The rotation of the wheel shown in Fig. 4 is caused by the sum of the two torques.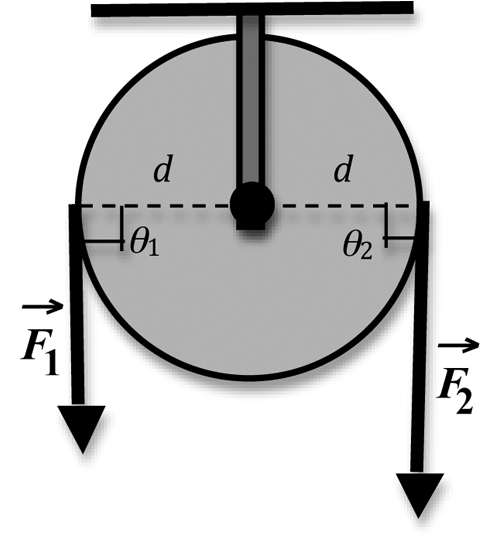
Figure 4: A wheel experiencing two torques
F1
will produce a positive or counterclockwise torque, while 1 F2
will produce a negative or clockwise torque. For rotation about the center the magnitude of the net torque will be the algebraic sum of the two torques:
2 ( 5 )
τtotal = F1d1 − F2d2.
r
and F.
The right-hand rule gives the direction of the cross product of two vectors. Based on this rule positive torques, such as . F1d1,
are directed out of the page, while negative torques, such as F2d2,
are directed into the page.
Definitions of equilibrium
Torque causes rotational motion with angular (or rotational) accelerationα,
( 6 )
τnet = Iα
α
is the angular acceleration. This equation is the angular equivalent of Newton's second law:
( 7 )
Fnet = ma.
( 8 )
| τ | |
 | |
| F | |
| |
OBJECTIVE
The objective of this experiment is to learn to measure torque due to a force and to adjust the magnitude of one or more forces and their lever arms to produce static equilibrium in a meter stick balanced on a knife-edge; use the conditions for equilibrium to determine the mass of the meter stick and the mass of an unknown object.Equipment
- Meter stick
- Knife-edge
- Known masses of varying values
- Unknown mass
- Balance
Procedure

Procedure A: Balancing Torques
1
Balance the meter stick on the knife-edge. The point at which the stick balances is the center of gravity of the meter stick. Enter this value on the worksheet.
2
Select two 200-gram masses and one 100-gram mass.
3
Refer to Fig. 5 and Fig. 6. Place a hanger at the 20-cm mark, a distance x1
cm to the left of the center of gravity and place mass m1 = 200 g
on it.
Place another hanger at the 65-cm mark, a distance
x2
cm to the right of the center of gravity and place a mass m2 = 200 g
on it.
Enter these values in Data Table 1.

Figure 5: Three balanced torques

Figure 6: Photo of experimental set up
4
Calculate the torques due to m1 and m2
and enter these values in Data Table 1. Be sure to include the sign of the torques.
5
Using the appropriate sign for each torque we can write the condition for rotational equilibrium as
( 9 )
| τ | |
| |
6
Use Eq. (9)| τ | |
| |
m1 and m2
to predict the torque due to m3
(including its sign) and enter this value in Data Table 1.
Be sure to include the sign of the torques.
7
Use the predicted value of the torque due to m3
to predict the position of x3
at which the third mass m3
must be placed to balance the meter stick. Record this value on the worksheet.
8
Experimentally determine the position x3 of m3
and enter this value on the worksheet.
9
Compare the two values for the position x3
by finding the percent difference between the predicted and experimental values of x3.
See Appendix B.
Checkpoint 1:
Ask your TA to check your set-up and calculations.
Ask your TA to check your set-up and calculations.
Procedure B: Finding the Mass of a Meter Stick
For this part of the experiment you will use a 200-gram mass, the meter stick and the knife-edge.10
Move the knife-edge to the 25-cm mark.
You will notice that the meter stick is no longer in equilibrium. The unbalanced force is the weight of the meter stick at its center of gravity.
11
Experimentally find the position, x1
of the 200-gram mass, needed to balance the meter stick. Enter the value of x1
and its uncertainty on the worksheet.
12
In the space provided in the worksheet, sketch and carefully label a diagram of the meter stick and the 200-gram mass.
Show all the torque-producing forces. Remember that the weight of the meter stick acts at its center of gravity.
Indicate on your diagram the directions (clockwise or counterclockwise) of each torque.
13
Calculate the torque due to the 200-gram mass and enter this value in Data Table 2.
14
Use the value of the torque due to the 200-gram mass and the conditions for rotational equilibrium to determine the torque due to the mass m2
of the meter stick. Enter this value in Data Table 2.
15
Using the value of the torque determined in step 14, calculate the value of the mass of the meter stick m2. Enter this value on the worksheet.
16
Calculate the uncertainty associated with the calculated mass and enter this value in the worksheet. See Appendix C.
17
Determine the percent uncertainty in the calculated value of the mass of the meter stick.
18
Use the balance to measure the mass of the meter stick.
19
Calculate the percent uncertainty in the measured mass of the meter stick.
20
Compare the measured and calculated values of the mass of the meter stick by computing the percent difference.
Checkpoint 2:
Ask your TA to check your diagram, set-up, uncertainty formula, and calculations.
Ask your TA to check your diagram, set-up, uncertainty formula, and calculations.
Procedure C: Determining an Unknown Mass
21
Position the center of gravity of the meter stick over the support.
22
Place a 50-gram mass m1
at the 70-cm mark and a 200-gram mass m2
at the 20-cm mark.
23
You will tie the free end of the string to a shot bucket around the 1-cm mark and hang it over the pulley as shown in Fig. 7 and Fig. 8.

Figure 7: Set-up for determining an unknown mass

Figure 8: Photo of set-up for determining an unknown mass
24
In the space provided on the worksheet, sketch and carefully label a diagram of this set-up.
Show all the torque-producing forces.
Indicate on your diagram the directions (clockwise or counterclockwise) of each torque.
25
Calculate the torques due to m1 and m2,
and enter these values in Data Table 3.
26
Use the values of the torques due to the two masses and the conditions for rotational equilibrium to determine the torque due to m3.
Enter this value in Data Table 3.
27
Use the equation below to calculate the uncertainty in the predicted mass of m3.
( 10 )
σm3 =
 |
|


28
Calculate the percent uncertainty in the predicted mass of the shot plus bucket.
29
Now add small masses to the bucket until the stick balances.
30
Determine the mass m3
and the associated uncertainty of the shot and bucket using a balance.
31
Calculate the percent uncertainty in the experimental mass of the shot plus bucket.
32
Compute the percent difference between the experimental and predicted values for the mass of the shot plus bucket.
Checkpoint 3:
Ask your TA to check your set-up, diagram and calculations.
Ask your TA to check your set-up, diagram and calculations.