
Angular Momentum
Topics and Files
Mechanics Topics
- Rotational motion; position, velocity, acceleration
- Rotational motion; velocity versus time
Capstone Files
- 39 Rotational Motion.cap
- 40 Rotational Inertia.cap
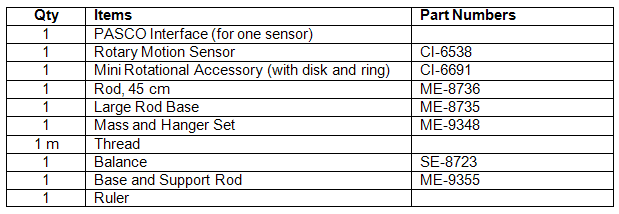
Equipment List
Introduction
This lab has two parts. The purpose of Experiment 1 is to measure the angular position and velocity of a rotating body. Use a rotary motion sensor to measure the rotation of a disk as the disk undergoes a constant angular acceleration. Use Capstone to record and display the data. Plot the angular position and angular velocity and analyze them. Compare the plots of angular position and angular velocity for the accelerating disk to plots of position and velocity for an accelerating fan cart. The purpose of Experiment 2 is to measure the initial and final angular speed of a system consisting of a non-rotating ring that is dropped onto a rotating disk and to verify the conservation of the angular momentum of the system. Use Capstone to record and display the linear speed before and after the torque-free collision.Background
For each kinematic quantity (i.e. displacement, velocity, etc.) there is an analogous quantity in rotational kinematics. The rotational version of position (x) is the "angular position" that is given by the Greek letter theta. The rotational version of velocity (v) is "angular velocity" that is given by the Greek letter omega. All translational (linear) quantities have rotational counterparts. The equations of kinematics for constant linear acceleration can be used for solving problems involving linear motion in one and two dimensions. For example, the motion of a fan cart accelerating on a flat track can be described by the equations of translational kinematics.( 1 )
v = v0 + at
( 2 )
x =
(v0 + v)t
| 1 |
| 2 |
( 3 )
x = v0t +
at2
| 1 |
| 2 |
( 4 )
v2 = v02 + 2ax
( 5 )
ω = ω0 + αt
( 6 )
θ =
(ω0 + ω)t
| 1 |
| 2 |
( 7 )
θ = ω0t +
αt2
| 1 |
| 2 |
( 8 )
ω2 = ω02 + 2αθ
( 9 )
τ = Iα
( 10 )
τ = R × F
= R × F
= R × F ( 11 )
τ =
= | Δ L |
| Δt |
( 12 )
L = Ii ωi = If ωf
= Ii ωi = If ωf Ii and If
are the initial and final rotational inertia of the system, with ωi and ωf
being the initial and final rotational speed of the system. The initial rotational inertia is that of a disk and the final inertia is that of the disk and a ring.
The ring has a moment of inertia
i and ωf ( 13 )
I =
M
R12 + R22
| 1 |
| 2 |
 |
 |
( 14 )
I =
MR2
| 1 |
| 2 |